Cet article propose une première approche des méthodes de relevé GNSS en topographie, en abordant les principes fondamentaux, les systèmes de référence, les techniques de mesure et les réglementations en vigueur en France.
Il ne prétend pas être exhaustif ni complet, mais vise à offrir une lecture accessible et structurée du sujet, permettant de mieux comprendre les enjeux et les applications du GNSS en topographie.
Pour approfondir certains points, des sources et références sont disponibles en fin de document.
1.Introduction
1.1. Définition du GNSS

Le GNSS (Global Navigation Satellite System) désigne l'ensemble des systèmes satellitaires permettant une géolocalisation précise à la surface de la Terre. Les principales constellations qui le composent sont :
- GPS (États-Unis) : Le premier système déployé, développé par le Département de la Défense des États-Unis.
- GLONASS (Russie) : Alternative au GPS, mis en place par la Russie.
- Galileo (Union Européenne) : Système européen mettant l'accent sur la haute précision et la couverture globale.
- BeiDou (Chine) : Constellation chinoise en expansion rapide.
1.2. Importance pour la Topographie
L'utilisation du GNSS a révolutionné la topographie en offrant :
- Une rapidité de relevé : Moins de temps passé sur le terrain.
- Une grande précision : Mesures centimétriques, voire millimétriques selon les méthodes.
Cela permet de garantir le même niveau de précision à grande échelle. Lorsque vous utilisez une station totale localement, vous êtes plus précis mais sur une plus longue distance le GPS sera plus consistant.
- Une accessibilité accrue : Possibilité de travailler dans des zones isolées, sans avoir besoin de points de repère physiques.
- Une intégration simplifiée : Les données GNSS sont directement compatibles avec les SIG (Systèmes d’Information Géographique) et les outils de CAO/DAO.
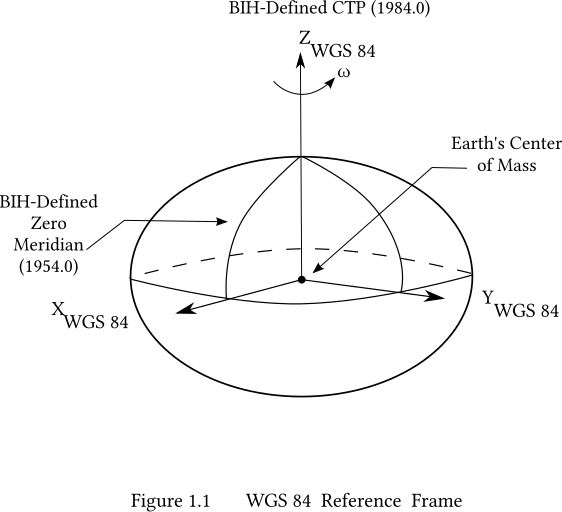
1.3. Systèmes de référence : le WGS84
Le WGS84 (World Geodetic System 1984) est la base géodésique globale. Il définit un ellipsoïde de référence et un ensemble de coordonnées (latitude, longitude, altitude ellipsoïdale) utilisé par le GPS. En France, le WGS84 est souvent converti en RGF93, la version locale adaptée pour réduire les distorsions régionales.
2. Historique des Systèmes et Projections en France
2.1. Les Systèmes Historiques
Avant l’adoption des systèmes de référence modernes comme le RGF93, la France s’appuyait sur des référentiels plus anciens pour la géodésie et la cartographie. Parmi eux, le NTF (Nouvelle Triangulation de la France) a longtemps été utilisé, reposant sur l’ellipsoïde de Clarke 1880 et des projections spécifiques comme le Lambert Zones.
Cependant, avec l’essor des technologies GNSS et la nécessité d’une meilleure précision et compatibilité internationale, ces systèmes historiques ont montré leurs limites. La transition vers le RGF93, aligné sur l’ITRF, a permis une amélioration significative en termes de cohérence et d’exactitude des coordonnées.
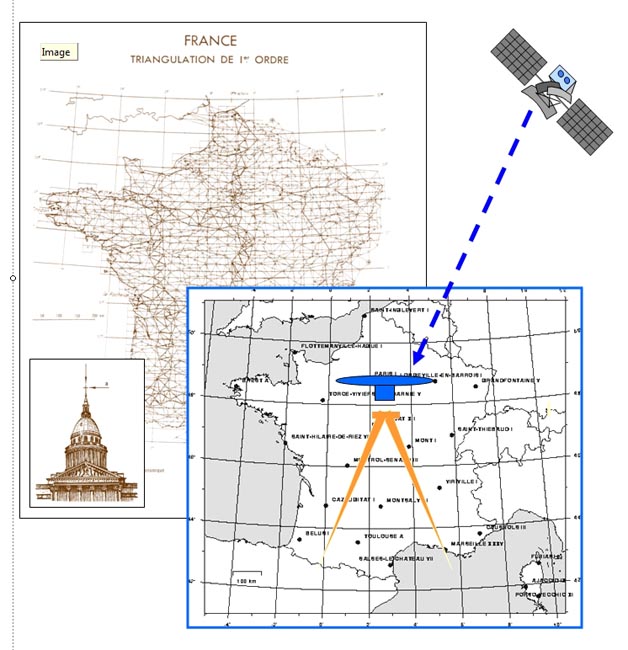
Le RGF93 a remplacé la NTF
- NTF (Nouvelle Triangulation de la France)
- Basé sur l'ellipsoïde de Clarke 1880.
- Employé jusqu'à la fin du XXe siècle.
- Associé aux projections Lambert Zones (I, II, III, IV).
- RGF93 (Référentiel Géodésique Français 1993)
- Aligné sur l’ITRF (International Terrestrial Reference Frame).
- Compatible GNSS et plus précis que la NTF.
- Constitue aujourd'hui la référence nationale pour les travaux géodésiques et topographiques.
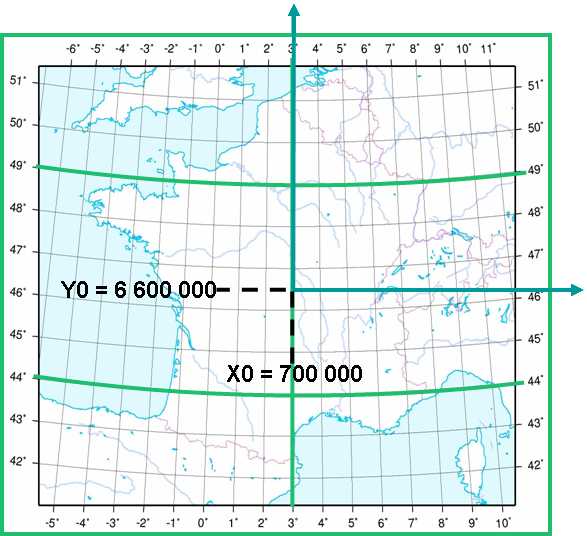
2.2. Projections Cartographiques
Une fois un système de référence défini, il est essentiel d’adopter une projection cartographique adaptée pour représenter la surface terrestre sur un plan. En France, plusieurs types de projections ont été utilisés en fonction des besoins et des échelles de travail.
La projection Lambert 93 est aujourd’hui la référence nationale, offrant une faible distorsion sur l’ensemble du territoire. Pour des besoins régionaux plus précis, des systèmes Lambert Coniques Conformes (CC42, CC46, etc.) ont été développés. Par ailleurs, le système UTM (Universal Transverse Mercator), utilisé à l’échelle internationale, est parfois privilégié pour l’échange de données.
- Lambert 93
- Projection conique conforme officielle minimisant les déformations sur l’ensemble du territoire.
- Recommandée pour la cartographie nationale.
- Projections Coniques Conformes (CC)
- Systèmes Lambert CC à l’échelle régionale (CC42, CC46, etc.).
- Approchées pour les zones de latitude moyenne, garantissant une meilleure précision locale.

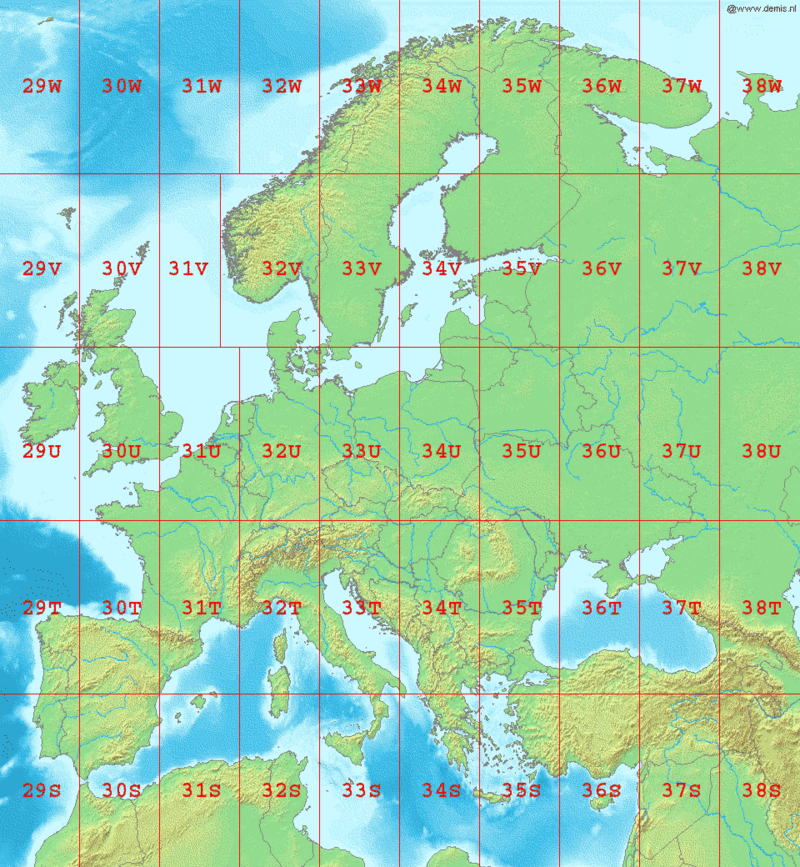
- UTM (Universal Transverse Mercator)
- Système international divisant le globe en fuseaux.
- Parfois utilisé en France pour des projets internationaux ou des échanges de données.
2.3. Rattachement altimétrique
L’altimétrie en France repose historiquement sur le Nivellement Général de la France (NGF), un réseau de repères altimétriques établi à partir du marégraphe de Marseille en 1884. Ce système servait de référence pour les altitudes orthométriques, c’est-à-dire les hauteurs mesurées par rapport au niveau moyen de la mer.
Le système NGF-IGN69 (mis en place en 1969) est la référence officielle en métropole pour les travaux topographiques et altimétriques. Il repose sur un réseau de repères géodésiques physiques disséminés sur le territoire et permet une mesure de l’altitude orthométrique par nivellement direct.
Avec l’essor du GNSS, qui fournit directement des hauteurs ellipsoïdales (par rapport à l’ellipsoïde de référence comme le WGS84 ou le RGF93), il est nécessaire d’appliquer des corrections géoïdales pour convertir ces hauteurs en altitudes cohérentes avec le système NGF.
Hauteur Ellipsoïdale, Altitude Orthométrique et Modèles de Géoïde
Grille de conversion altimétrique
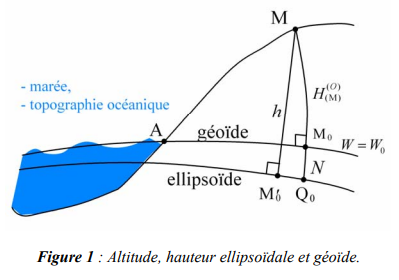
Le positionnement GNSS fournit une hauteur ellipsoïdale (h), qui est la distance entre un point et l’ellipsoïde de référence utilisé (ex : GRS80 pour le RGF93). Or, cette hauteur ne correspond pas à la hauteur physique perçue sur Terre, car l’ellipsoïde est un modèle mathématique ne prenant pas en compte les variations gravimétriques.
L’altitude orthométrique (H), utilisée pour les travaux topographiques et de nivellement, est définie par rapport au géoïde, qui représente la surface équipotentielle du champ de gravité terrestre, plus proche du niveau moyen de la mer.
La relation entre ces grandeurs est donnée par la formule :
H=h−N
où :
- H est l’altitude orthométrique (référencée au NGF-IGN69 en métropole),
- h est la hauteur ellipsoïdale mesurée par GNSS,
- N est l’ondulation du géoïde (écart entre le géoïde et l’ellipsoïde).
Pour réaliser cette conversion, des modèles géoïdaux sont utilisés. En France, les grilles de correction les plus récentes sont basées sur RAF20 (Références Altimétriques Françaises 2020), qui fournit une modélisation fine du géoïde permettant de convertir les hauteurs GNSS en altitudes NGF avec une précision accrue.
3. Notions de Géodésie et Systèmes de Coordonnées
3.1. Principes de la Géodésie
La géodésie est la science qui étudie la forme et les dimensions de la Terre, ainsi que son champ de gravité. Elle joue un rôle fondamental en topographie, car elle permet d’établir des systèmes de référence précis pour le positionnement et la cartographie.
Pour représenter la surface terrestre, plusieurs modèles sont utilisés :
- L’ellipsoïde permet une approximation mathématique de la forme de la Terre.
- Le géoïde correspond à la surface équipotentielle du champ de gravité terrestre, plus fidèle à la réalité physique.
Grâce à ces concepts, la géodésie définit des systèmes de coordonnées précis, essentiels pour le positionnement GNSS et l’élaboration des cartes topographiques.
La géodésie vise à :
- Déterminer la forme et les dimensions de la Terre (ellipsoïde, géoïde).
- Établir des systèmes de référence (ex : WGS84, RGF93).
- Permettre l’expression de coordonnées précises (latitude, longitude, altitude).
3.2. Comparaison des Systèmes de Coordonnées et Exemples
Le positionnement géodésique repose sur différents systèmes de coordonnées, chacun répondant à des besoins spécifiques en matière de précision et d’application. Ces systèmes peuvent être géographiques (latitude, longitude, altitude) ou projetés (X, Y en mètres sur un plan).
Par exemple, le WGS84 est le système de référence mondial utilisé par le GPS, tandis que le RGF93 / Lambert 93 est le référentiel officiel en France pour assurer la cohérence avec les données géodésiques nationales. D’autres systèmes comme l’UTM ou les projections Lambert Coniques Conformes (CC42, CC46, etc.) sont utilisés en fonction des besoins régionaux.
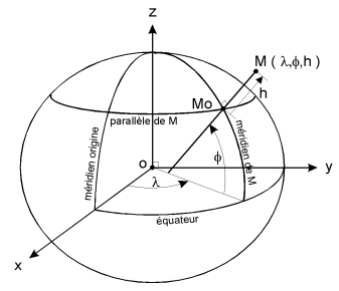
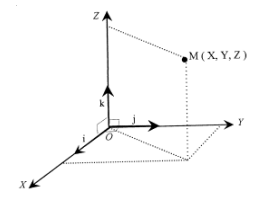
Coordonnées géographiques comparé aux coordonnées cartésiennes
Ci-dessous, quelques exemples de coordonnées approximatives du Bureau de Capture Solutions à Paris, exprimées dans différents systèmes :
Les plages de coordonnées varient selon la projection. Par exemple, Lambert 93 affiche généralement X entre 600 000 et 1 200 000, et Y entre 6 000 000 et 7 200 000.
| Système | Type | Coordonnées Approximatives |
| WGS84 | Latitude/Longitude | 48.8566° N, 2.3522° E |
| RGF93 / Lambert 93 | Coordonnées projetées | X = 657 892.00, Y = 6 862 321.00 |
| NTF / Lambert II étendu | Coordonnées projetées | X = 600 214.00, Y = 2 425 321.00 |
| UTM Zone 31N | Coordonnées projetées | X = 448 251.00, Y = 5 411 932.00 |
| CC46 (Île-de-France) | Coordonnées projetées | X = 700 215.00, Y = 6 854 312.00 |
4. Technologie GNSS et Méthodes de Relevé
4.1. Comment fonctionne le GNSS ?
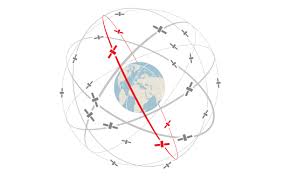
Le GNSS (Global Navigation Satellite System) permet de déterminer une position précise en trois dimensions grâce à un réseau de satellites en orbite autour de la Terre. Son fonctionnement repose sur la triangulation, où un récepteur GNSS mesure le temps de propagation des signaux émis par plusieurs satellites pour calculer sa position.
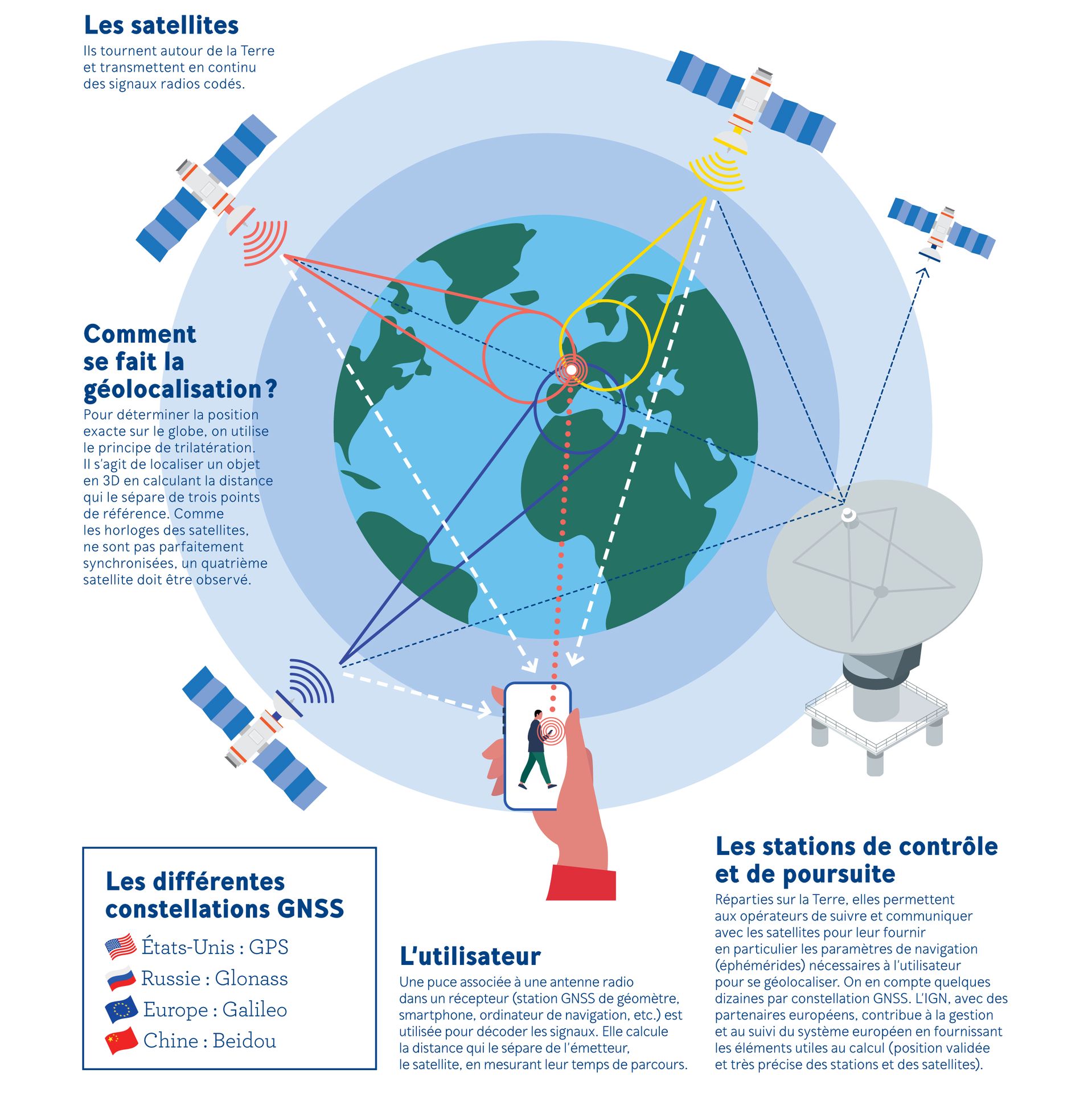
https://www.ign.fr/reperes/comment-fonctionne-la-geolocalisation-par-satellites
Chaque satellite transmet des éphémérides (données orbitales) et une horloge interne extrêmement précise, permettant au récepteur de calculer la distance qui le sépare de chaque satellite. En combinant ces distances, il est possible de déterminer une position avec une précision variant de quelques mètres à quelques millimètres selon la méthode utilisée (GNSS standard, RTK, PPP, post-traitement).
- Constellations de satellites Le récepteur reçoit des signaux de plusieurs satellites (au moins 4) pour déterminer sa position en 3D.
- Horloge et éphémérides Chaque satellite transmet son horloge ainsi que ses éléments orbitaux.
- Calcul des distances Le récepteur évalue le temps de propagation des signaux et déduit la distance à chaque satellite.
- Triangulation La position finale est obtenue par résolution d’un système d'équations reliant les distances satellites/récepteur.
4.2. Sources d’erreurs et corrections
Bien que le GNSS soit une technologie de positionnement extrêmement précise, plusieurs facteurs d’erreurs peuvent affecter la qualité des mesures. Ces erreurs proviennent principalement de l’atmosphère, des satellites, de l’environnement du récepteur et de la géométrie des signaux.
Parmi les principales sources d’erreurs, on retrouve :
- Les erreurs atmosphériques : la troposphère et l’ionosphère peuvent ralentir et dévier les signaux GNSS.
- Les erreurs orbitales et d’horloge : de légers écarts dans la position des satellites ou leur synchronisation peuvent impacter la précision.
- L’effet multipath : les signaux GNSS peuvent être réfléchis par des bâtiments ou des obstacles, créant des interférences.
- Le GDOP (Geometric Dilution of Precision) : une mauvaise répartition des satellites peut réduire la précision du positionnement.
Heureusement, plusieurs méthodes de correction permettent d’atténuer ces erreurs, comme l’usage de corrections différentielles (RTK, DGPS) ou le post-traitement.
- Erreurs atmosphériques (ionosphère, troposphère) : Atténuées par des modèles de correction ou des observations double-fréquence.
- Erreurs orbitales et d'horloge : Corrigées via des éphémérides précises et des stations de référence.
- Effet multipath : Difficile à corriger. Il faut être attentif et vigilant sur le terrain à son environnement.
- GDOP (Geometric Dilution of Precision) : Lié à la géométrie des satellites (meilleure précision si les satellites sont répartis sur une large portion du ciel). Il existe des outils pour prévoir la date et heure d'intervention pour une disposition optimale des satellites.
Avantages et inconvénients de chaque méthode
| Méthode | Avantages | Inconvénients |
| GNSS Standard | - Matériel peu coûteux - Pas de besoin d'abonnement - Simple à mettre en œuvre | - Précision limitée (5 à 10 m) - Inadapté aux travaux de haute précision |
| DGPS (Differential GPS) | - Précision submétrique (souvent 0.5 à 1 m) - Utilisable en temps quasi-réel si station à proximité | - Dépendance à une station de référence - Couverture limitée à quelques dizaines de km autour de la station |
| RTK (Real-Time Kinematic) | - Précision centimétrique (1-2 cm) - Retour instantané des coordonnées - Idéal pour chantiers | - Besoin d'une liaison radio ou internet - Abonnement coûteux aux réseaux (Teria, Orphéon) - Couverture réseau à vérifier |
| PPP (Precise Point Positioning) | - Indépendant des bases locales - Bonne précision (10 à 30 cm, voire mieux) - Possible en zone isolée | - Temps de convergence (15-30 min) - Moins adapté aux environnements urbains - Services souvent payants (RTX, TerraStar) |
| Post-traitement GNSS | - Très haute précision (mm-cm) - Méthode de référence pour la géodésie - Fiable même en zone éloignée | - Processus plus lent (collecte + traitement) - Nécessite un logiciel spécialisé - Formation plus poussée du personnel |
4.3. Coûts et enjeux pour les professionnels
L’utilisation du GNSS en topographie implique des choix stratégiques en fonction des besoins de précision, des contraintes techniques et des coûts associés. Chaque méthode GNSS (RTK, PPP, post-traitement) présente un équilibre entre investissement matériel, abonnement aux services de correction et exigences de précision.

Les professionnels doivent prendre en compte plusieurs facteurs avant de choisir une méthode GNSS :
- Coûts initiaux
- Achat du récepteur, de l'antenne, des accessoires (perche, trépied).
- Éventuelle formation du personnel pour l'utilisation de logiciels de post-traitement ou de visualisation.
- Abonnements et couverture réseau
- Pour le RTK, un abonnement aux réseaux professionnels (Teria, Orphéon) peut s'avérer indispensable. Les coûts varient selon la durée de l'abonnement (mensuel, annuel) et la zone de couverture.
- Le PPP requiert souvent un abonnement à un service spécialisé (Trimble RTX, TerraStar, etc.). Bien qu'il ne dépende pas d'une station locale, un accès internet peut être nécessaire pour recevoir les données de correction.
- Dans les zones rurales ou montagneuses, la couverture télécom peut faire défaut, ce qui complique l'usage du RTK en temps réel.
- Simplicité d'utilisation et organisation
- Le RTK fournit un positionnement centimétrique immédiat, idéal pour les chantiers où le gain de temps est crucial. Toutefois, il faut s'assurer de la disponibilité du réseau de correction en continu.
- Le post-traitement est plus exigeant (collecte puis traitement des données), mais offre une précision élevée et une plus grande flexibilité dans des environnements complexes ou lorsque la liaison réseau fait défaut.
- Exigences de précision et de fiabilité
- Les projets d’ingénierie civile, de géodésie ou de scan 3D requièrent souvent des précisions de l’ordre du centimètre, voire du millimètre.
- Certains chantiers peuvent se contenter d’une précision submétrique (ex. aménagements routiers de moindre envergure).
- Sécurité des données et garantie de qualité
- Les professionnels exigent souvent des Services Level Agreements (SLA) et un support technique pour assurer une disponibilité minimale du service de correction.
- Les réseaux privés proposent généralement un support client réactif, tandis que les solutions communautaires (ex. Centipède) n’offrent pas toujours de garanties de service.
Au final, le choix d’une méthode GNSS dépend de la nature du projet, des objectifs de précision et du budget disponible. Pour des travaux de haute précision et une opération immédiate, l’usage du RTK ou du post-traitement s’impose. Pour des relevés à moindre coût et précision submétrique, un DGPS ou un GNSS standard peut suffire.
5. Application en France
5.1. Réseau GNSS Permanent (RGP) de l’IGN
En France, l’IGN (Institut Géographique National) a mis en place un Réseau GNSS Permanent (RGP) permettant de fournir des données brutes pour le post-traitement et assurer une cohérence avec le référentiel géodésique national RGF93. Ce réseau est constitué de plusieurs dizaines de stations fixes réparties sur le territoire, enregistrant en continu des observations GNSS.
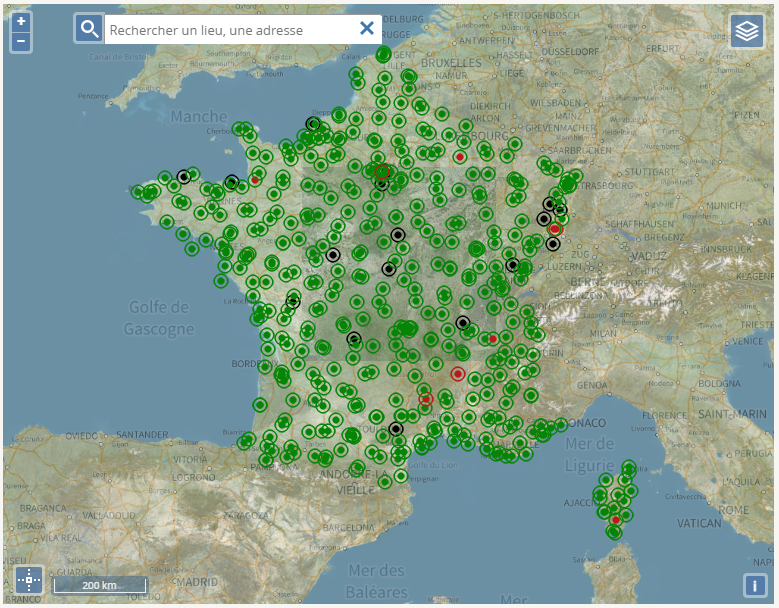
L’accès à ces données permet aux professionnels d’améliorer la précision des relevés en recalant leurs mesures sur un système de référence stable et fiable.
- Propose des données brutes de stations fixes pour le post-traitement.
- Couverture nationale avec plusieurs dizaines de stations.
- Aligné sur le RGF93, assurant une cohérence avec les référentiels français.
5.2. Réseaux privés : Teria, Orphéon, etc.
En complément du RGP, plusieurs réseaux privés offrent des services de correction GNSS en temps réel (RTK). Parmi eux, Teria, Orphéon et SmartNet sont les principaux fournisseurs en France, proposant une couverture nationale et une précision centimétrique instantanée.
Ces réseaux fonctionnent par abonnement et nécessitent une connexion Internet ou radio pour recevoir les corrections en direct. Ils sont largement utilisés pour des applications où la précision immédiate est essentielle, comme les travaux topographiques, le guidage de machines ou les relevés de précision.
- Fournissent des corrections RTK en temps réel.
- Offrent des garanties en termes de disponibilité et de support client.
- Coût d'abonnement mensuel/annuel.

5.3. Centipède
Le réseau Centipède est une alternative open-source aux solutions commerciales, offrant des corrections GNSS à moindre coût grâce à une approche collaborative. Contrairement aux réseaux privés, Centipède repose sur une communauté d’utilisateurs partageant leurs données GNSS en temps réel.
Bien que cette solution soit plus économique, sa couverture et sa fiabilité peuvent varier selon les régions. Elle est donc particulièrement adaptée aux projets à budget limité ou aux utilisateurs souhaitant expérimenter des solutions innovantes.
- Réseau communautaire open-source permettant un accès à des corrections RTK à coût réduit.
- Moins fiable et moins dense que les réseaux professionnels.
- Peut convenir à des usages non critiques ou des projets à budget limité.
6. Optimiser le Rattachement d’un Projet de Scan 3D
6.1. Bonnes pratiques de rattachement (État de l’art)
Le rattachement géodésique est une étape essentielle pour garantir l’exactitude et la cohérence des mesures topographiques, en particulier lors de la réalisation de relevés en scan 3D. Une mauvaise gestion du rattachement peut entraîner des écarts significatifs, compromettant la fiabilité des données.

Pour assurer un rattachement précis et robuste, plusieurs bonnes pratiques doivent être respectées :
- Planification du relevé : choix des points de contrôle et anticipation des contraintes terrain.
- Multiplication des points de contrôle : pour garantir la stabilité et la précision du recalage.
- Vérification et documentation des mesures : assurer la traçabilité et la conformité des relevés.
Dans cette section, nous verrons les meilleures pratiques utilisées par les professionnels pour garantir un rattachement optimal et une intégration efficace des données dans un système de coordonnées précis.
- Préparation et planification
- Analyser la zone à scanner (accès, visibilité GPS, obstacles potentiels).
- Identifier en amont les contraintes techniques (précision requise, environnement urbain dense, couvert végétal).
- Multiplication des points de contrôle
- Disposer d’au moins 3 points de contrôle bien répartis autour et si possible 1 point au centre de la zone pour un recalage robuste.
- Vérifier que chaque point de contrôle soit mesurable au GNSS (RTK ou post-traitement) avec une solution stable.
- Redondance et cohérence des mesures
- Effectuer plusieurs mesures GNSS à quelques minutes d’intervalle sur chaque point de contrôle pour obtenir une moyenne.
- Si possible, observer différents sets de satellites (multi-constellation, multi-fréquences) pour améliorer la qualité.
- Gestion des altitudes
- Vérifier la définition du système altimétrique (ellipsoïdal vs orthométrique), éventuellement utiliser un modèle de géoïde local (ex. RAF20) pour convertir.
- Considérer l’effet potentiel de marée ou de déformation si précision extrême requise.
- Matériel et calibration
- Contrôler périodiquement l’antenne GNSS (offset, phase center variation).
- Calibrer ou valider la précision des instruments de scan 3D (scanner laser, station totale) avant le relevé.
- Révision des tolérances
- Définir clairement les tolérances acceptables (p. ex. ±2 cm en planimétrie et ±3 cm en altimétrie) en fonction du projet.
- Les partager avec toutes les parties prenantes (client, équipe de terrain, bureau d’études).
- Documentation et traçabilité
- Noter les conditions de mesure (météo, date, heure, masques satellites) pour chaque point de contrôle.
- Conserver des rapports de vérification (écarts, statistiques) pour assurer la traçabilité du rattachement.
Avec ces pratiques, le professionnel garantit la fiabilité du rattachement et la cohérence géospatiale du nuage de points.
7. Réglementation
7.1. Obligation de rattachement
En France, l'utilisation du RGF93 (Référentiel Géodésique Français 1993) est obligatoire pour tous les travaux topographiques et géodésiques, conformément aux réglementations en vigueur. Ce référentiel a été instauré pour garantir une cohérence nationale des données géographiques, notamment en raison de l’évolution des systèmes GNSS et de l’alignement avec les standards internationaux ITRF (International Terrestrial Reference Frame).
L’obligation de rattachement au RGF93 est encadrée par plusieurs textes officiels :
- Décret n° 2006-272 du 3 mars 2006, qui impose l'utilisation du RGF93 / Lambert 93 comme référence géodésique nationale.
- Arrêté du 26 décembre 2019, précisant les modalités d’intégration du RGF93 et des projections associées (Lambert 93, Lambert CC) dans les documents d’urbanisme et les relevés cadastraux.
- Normes IGN et CNIG, imposant l’usage du RGF93 pour la constitution des bases de données géographiques publiques et les travaux d’ingénierie topographique.
L’utilisation des altitudes en France est strictement encadrée par la réglementation :
- Le NGF-IGN69 reste la référence altimétrique en métropole pour les travaux de nivellement et d’altimétrie réglementaire.
- Le décret n°2000-1276 du 26 décembre 2000 impose le RGF93 en planimétrie et le NGF-IGN69 en altimétrie pour les levés topographiques destinés aux services publics.
- L’IGN fournit des outils et des grilles de correction permettant la transformation des hauteurs GNSS en altitudes conformes aux normes nationales.
7.2. Dans quel but ?
L’imposition du RGF93 permet de :
- Assurer une homogénéité des relevés sur tout le territoire français.
- Faciliter l’interopérabilité des données avec les systèmes internationaux et les SIG (Systèmes d’Information Géographique).
- Limiter les erreurs de transformation entre anciens et nouveaux systèmes de coordonnées.
- Répondre aux exigences des marchés publics et des grands projets d’infrastructure (IGN, géomètres-experts, collectivités).
8. Conclusion et Perspectives
8.1. Avantages et Limites du GNSS
Le GNSS s’est imposé comme une technologie incontournable en topographie, offrant un positionnement rapide, précis et opérationnel dans des environnements variés. Grâce aux avancées techniques, les géomètres et ingénieurs peuvent travailler avec des précisions allant du mètre au millimètre, selon les méthodes utilisées.
Cependant, le GNSS présente aussi certaines limites :
- Dépendance aux signaux satellites, rendant difficile son utilisation en milieu dense (forêts, canyons urbains).
- Nécessité d’une correction externe (RTK, PPP) pour atteindre une haute précision.
- Coûts d’équipement et d’abonnement pouvant être un frein pour certaines structures.
Bilan des avantages et des contraintes du GNSS en topographie :
- Points forts :
- Précision, rapidité, polyvalence.
- Intégration simple avec les données de scan3D .
- Contraintes :
- Zones mal couvertes (forêts denses, canyons urbains).
- Abonnements coûteux pour bénéficier des corrections RTK.
8.2. Évolutions futures
Les technologies GNSS ne cessent d’évoluer pour offrir des solutions toujours plus précises, fiables et accessibles. Plusieurs tendances émergent et pourraient transformer le secteur de la topographie dans les années à venir :
- Galileo : Amélioration continue de la constellation européenne pour plus de précision et de fiabilité.
- Fusion GNSS/Inertiel : Intégration de capteurs IMU (Inertial Measurement Unit) pour pallier les pertes de signal.
- Amélioration du PPP : Temps de convergence réduit grâce à une gestion fine des éphémérides et horloges satellites.
Ces évolutions ouvrent de nouvelles perspectives pour les professionnels, facilitant les relevés dans des environnements complexes et augmentant la fiabilité des mesures.
9. Ressources et Illustrations
- IGN - Référentiels et projections
- Portail des réseaux GNSS en France (RGP)
- Transformation de coordonnées IGN
- Documentation sur le réseau Centipède
- SCAN 3D : Guides de préconisations (ex. Leica, Faro, Trimble)
Illustrations Recommandées
- Schéma de triangulation GNSS : Montrant la relation entre récepteur et constellations de satellites.
- Carte des réseaux GNSS en France : Localisant RGP, Teria, Orphéon.
- Comparatif des projections : Lambert 93, UTM, CC.
- Courbe de convergence PPP : Illustrant le temps nécessaire pour atteindre la précision optimale.
- Exemple de Recalage Scan 3D : Visualisation des points de contrôle et du nuage.
